New $5M Grant to Support Robotics Research for Spinal Cord Injury Patients
Balance is an essential component of daily life, something many of us take for granted. But not everyone can. In the United States alone, there are about 300,000 people living with spinal cord injury (SCI) and some 12,000 new SCI cases each year, most of them young adults, 80% of them men. The recovery of motor functions—walking, standing, and balance—after a SCI is slow and limited, can be highly variable, and can take months or even years. The cost of care for SCI patients is enormous—annually over $3 billion. Studies have shown, however, that activity-based interventions offer a promising approach, and Sunil Agrawal, professor of mechanical engineering and of rehabilitation and regenerative medicine, is at the forefront of research efforts to improve recovery through the development of novel robotic devices and interfaces that help patients retrain their movements.
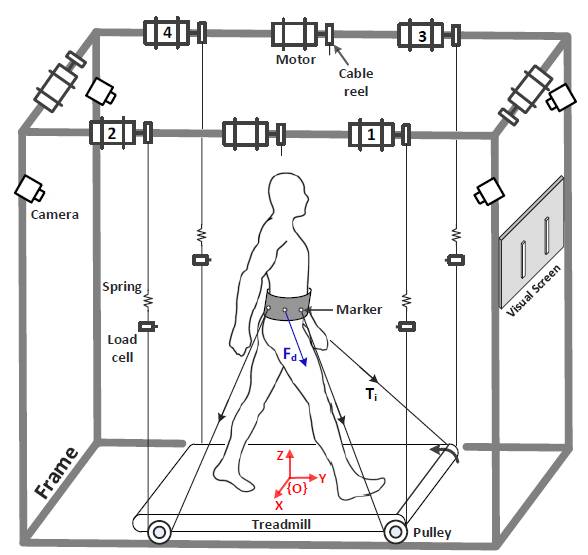
Diagram of a Tethered Pelvic Assist Device (TPAD)
—Image courtesy of Sunil Agrawal
One of Agrawal’s current projects, “Tethered Pelvic Assist Device (TPAD) and Epidural Stimulation for Recovery of Standing in Spinal Cord Injured Patients,” recently won a five-year $5 million grant from the New York State Spinal Cord Injury Board. The project is a collaboration with co-PI Susan Harkema and Claudia Angeli in the Department of Neurological Surgery at the University of Louisville, KY, and Joel Stein, Chair of the Department of Rehabilitation and Regenerative Medicine, and Ferne Pomerantz, MD, assistant professor of rehabilitation and regenerative medicine in the Department of Rehabilitation and Regenerative Medicine, both at Columbia University Medical Center. Agrawal’s focus is on improving the effectiveness of stand/balance training during SCI rehabilitation by using a unique robotic system—Tethered Pelvic Assist Device (TPAD)—invented in his Robotics and Rehabilitation (ROAR) Laboratory.
Harkema’s group at the University of Louisville has pioneered the use of activity-based rehabilitation for SCI patients and, more recently, the use of epidural stimulation of the lumbosacral spinal cord during stand training of SCI subjects. Their results show the effectiveness of stand training of SCI patients by combining epidural stimulation and principles of motor learning. The group has successfully shown this strategy to work with the most severely injured individuals. Even though these patients are able to stand, they are unable to maintain balance. As a result, they have difficulty in transferring this skill to the activities of daily life.
Agrawal’s TPAD is a wearable, light-weight cable-driven robot that can be programmed to provide both motion perturbations to the pelvis as well as corrective forces to stabilize it. The Agrawal and Harkema groups will combine their expertise and technologies for balance training of SCI patients during standing.
“We are using this technology for the first time to enhance the effectiveness of balance recovery during stand training of SCI survivors,” says Agrawal, who has, in the past, received funding from the National Institutes of Health to work extensively on gait training of stroke survivors by designing robotic exoskeletons that can be worn by patients during training in the rehab clinics. “Robotic exoskeletons are typically designed to assist in training of human movements during the swing phase of the gait, but there are currently no robotic devices that can effectively be used for posture and balance training during standing.”
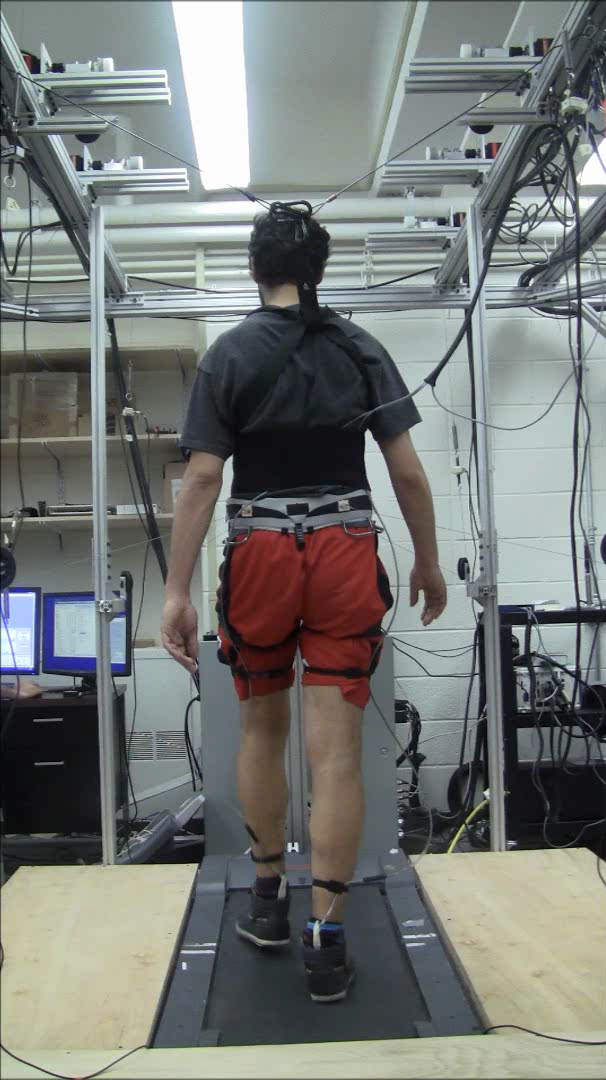
Patient walking on a TPAD. —Image courtesy of
Agrawal’s TPAD consists of a pelvic belt with multiple cables connected to motors, a real-time motion capture system, and a real-time controller to regulate the tensions in the cables. The device is programmed to provide pelvic forces in any direction and respond to motions of the human body. Its tethers can also be configured to apply symmetric or asymmetric forces on the pelvis, as needed by an intervention. The system design allows placement of motors and pulleys on a frame to achieve cable configurations to be able to apply corrective or perturbative forces on the pelvis in any direction, whether these be up, down, or sideways.
“Our TPAD, along with its extensions, can be used in a variety of interventions during walking or standing,” adds Agrawal, who is also a member of Columbia’s Data Science Institute. “So sensory input, repetition, and challenged behavior can drive the spinal networks to adapt appropriately and generate functional activation across the level of injury. This functional load bearing and acquisition of balance can have a tremendous impact on the continued health and quality of life of individuals with SCI.”
In addition to the TPAD grant, Agrawal was honored recently by the American Society of Mechanical Engineering with its Machine Design Award for his “seminal contributions to the design of robotic exoskeletons for gait retraining of stroke patients.” Established in 1958, the award recognizes eminent achievement. The only other recipient of this award from Columbia University was Professor Ferdinand Freudenstein in 1972, considered to be the “Father of Modern Kinematics.”